
ซีเมนส์ควบคุม PLC ยามาฮ่าหุ่นยนต์
เวลา:2023-01-28 16:00:06
บทความนี้แนะนำกลยุทธ์การควบคุมของหุ่นยนต์ Yamaha ที่ควบคุมโดย Siemens PLC โดยใช้พอร์ต IO ภายนอกเพื่อตั้งค่าคำสั่งเพื่อให้ PLC สามารถสื่อสารกับหุ่นยนต์และสั่งให้หุ่นยนต์ดำเนินการที่สอดคล้องกัน
Siemens S7-300PLC เป็น PLC ขนาดใหญ่และขนาดกลางที่ใช้กันอย่างแพร่หลายในประเทศจีน การวิจัยเกี่ยวกับกลยุทธ์การควบคุมหุ่นยนต์ต่อพ่วงมีความสำคัญอย่างยิ่งในด้านระบบอัตโนมัติของอุปกรณ์ บทความนี้ขึ้นอยู่กับการวิจัยและการผลิตสายการผลิตแบตเตอรี่ลิเธียมเสร็จสิ้นการสื่อสารและการควบคุมของ Siemens S7300PLC และ Yamaha Robot เสร็จสิ้นการวิจัยและพัฒนากระบวนการที่สำคัญสองประการของการเสริมแรงและการเจาะในกระบวนการของอุปกรณ์แบตเตอรี่ลิเธียม
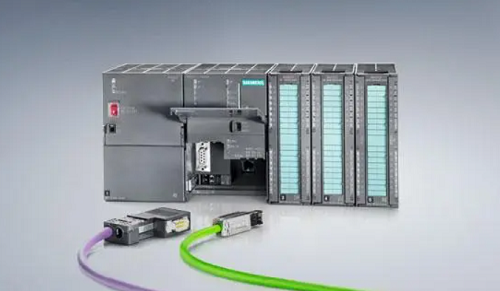
1. การออกแบบฮาร์ดแวร์โดยรวม
การเชื่อมต่อตัวควบคุมหุ่นยนต์ของ SIEMENS S7-300PLC และ YAMAHA จำเป็นต้องเชื่อมต่อสัญญาณเริ่มต้นของหุ่นยนต์สัญญาณหยุดฉุกเฉินสัญญาณผิดพลาดและสัญญาณรีเซ็ต ความต้องการพื้นฐานของหุ่นยนต์ควบคุมสามารถเข้าถึงได้ผ่านสัญญาณสี่กลุ่มและการเชื่อมต่อ PLC PLC เชื่อมต่อกับหุ่นยนต์ โดยปกติ PLC จะใช้เป็นด้านการส่งคำแนะนำและหุ่นยนต์จะใช้เป็นด้านการรับคำแนะนำ เพื่อให้บรรลุวัตถุประสงค์ของหุ่นยนต์ควบคุม PLC ที่จะเดินไปยังแต่ละจุดจำเป็นต้องมีการสื่อสารสัญญาณ PLC และหุ่นยนต์ IO
เมื่อรวมกับการศึกษาทางเทคนิคของกระบวนการวางเหล็กและปั๊มในกระบวนการติดตั้งแบตเตอรี่ลิเธียม จึงสรุปว่าหุ่นยนต์จะมีจุดเดินได้ไม่เกิน 16 จุด จากการคำนวณจุดของ 8421 จุดเชื่อมต่อของ Robot และ PLC มี 4 จุด เลือกบอทมาตรฐาน PNP เพื่อเชื่อมต่อกับซีเมนส์ การเชื่อมต่อสัญญาณประกอบด้วยสองส่วน: ส่วนหนึ่งคือการเริ่มต้นหยุดฉุกเฉินความล้มเหลวและการรีเซ็ตสัญญาณ ส่วนหนึ่งเป็นสายสื่อสารระหว่าง PLC และหุ่นยนต์ระหว่างสี่จุด มีสัญญาณ 8 ชุด
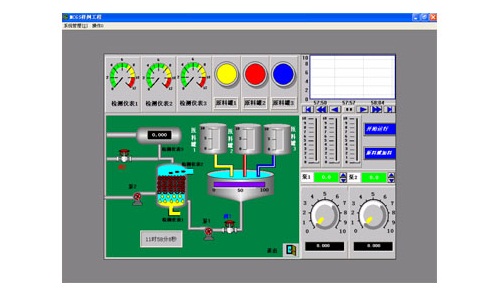
2. การออกแบบซอฟต์แวร์โดยรวม
กลยุทธ์การควบคุมซอฟต์แวร์สำหรับการสอบถามหุ่นยนต์วิธีการคำสั่ง PLC ตระหนักถึงการควบคุมโดยรวม ใช้หุ่นยนต์ซ้อนเป็นตัวอย่างหุ่นยนต์กลับมาส่งสัญญาณ 1001 สอบถามหุ่นยนต์ตามข้อกำหนดทางวิศวกรรมเพื่อรับสัญญาณและสั่งให้หุ่นยนต์ไปที่ตำแหน่งเป้าหมายและสัญญาณ Azimuth เป้าหมายคือ (0001 --- 1011) รวม 9 จุดได้รับหุ่นยนต์จุดย้ายเข้าที่หลังจากอยู่ในตำแหน่งร่วมกันแล้วส่งสัญญาณเพื่อแจ้งให้หุ่นยนต์ทราบ หุ่นยนต์ควบคุมการทำงานของอุปกรณ์ต่อพ่วงอื่น ๆ (กระบอกสูบมอเตอร์ ฯลฯ ) และบอกหุ่นยนต์กลับไปที่ตำแหน่งหลังจากการกระทำเสร็จสิ้น เมื่อ ธปท.กลับสู่ตำแหน่งแล้วให้รอคำสั่งตั้งค่าต่อไป วงจรการกระทำสิ้นสุดลง
ผ่านการสื่อสารและการควบคุมระหว่าง SIEMENS S7-300PLC และ YAMAHA ROBOT การวิจัยและพัฒนาการเสริมแรงและการเจาะรูที่สำคัญสองขั้นตอนในกระบวนการติดตั้งแบตเตอรี่ลิเธียมเสร็จสมบูรณ์ วิธีการของ PLC และหุ่นยนต์ผ่านการเชื่อมต่อปลายส่งสัญญาณถูกนำไปใช้ในด้านอุปกรณ์แบตเตอรี่ซึ่งมีบทบาทในการสาธิตที่ดี สามารถใช้ในลำดับของอุปกรณ์แบตเตอรี่อื่น ๆ การอ้างอิงถึงวิธีการควบคุมและกลยุทธ์การควบคุมของ PLC และหุ่นยนต์อื่น ๆ สามารถยุติการทำงานของหุ่นยนต์ควบคุม PLC ส่วนใหญ่ไปยังจุดทำงานซึ่งมีผลการส่งเสริมที่ดี
-
 202307-20
202307-20ข้อผิดพลาดทั่วไปและวิธีการจัดการกับเทอร์โม rkc
1, ไฟแสดงสถานะพลังงานเป็นเรื่องปกติ แต่เทอร์โมสตัทไม่มีหน้าจอแสดงผล ความล้มเหลวนี้ส่วนใหญ่เกิดจากตัวควบ···
-
 202302-09
202302-09วิธีการรักษาหน้าจอสัมผัส MCGS
1. เช็ดหน้าจอโทรศัพท์ด้วยผ้าแห้งก่อนเปิดโทรศัพท์ทุกวัน2. เครื่องดื่มหรือหยดน้ำตกบนหน้าจอจะทำให้ซอฟต์แวร···
-
 202301-30
202301-30วิธีการตั้งค่าพารามิเตอร์ตัวแปลงความถี่ ABB
1. พารามิเตอร์ GROUP99: ใช้แมโครเลือกมาโครมาตรฐานปรับค่ามอเตอร์ตามข้อมูลแบรนด์มอเตอร์ปรับเปลี่ยนค่าที่ตั้งไ···
-
 202212-29
202212-29องค์ประกอบของ Kunlun MCGS Embedded Organization Software
ระบบผู้ใช้ที่สร้างขึ้นโดย MCGS Embedded Edition ประกอบด้วยห้าส่วน: หน้าต่างควบคุมหลักหน้าต่างอุปกรณ์หน้าต่างผู้ใช···
-
 202303-02
202303-02มิตซูบิชิอินเวอร์เตอร์แจ้งเตือนประวัติยืนยันและล้าง
เมื่อตัวแปลง FR-CS80 ตรวจพบความผิดปกติจะแสดงข้อมูลความผิดปกติหรือสัญญาณเตือนบนแผงปฏิบัติการตามเนื้อหาที่ผ···


 +86 13811814778
+86 13811814778 +86 13811814778
+86 13811814778
 อาคาร 26 ชุมชน Liyuan ถนน Xiangjiang North Cuigezhuang เขต Chaoyang ปักกิ่ง
อาคาร 26 ชุมชน Liyuan ถนน Xiangjiang North Cuigezhuang เขต Chaoyang ปักกิ่ง