
องค์ประกอบของ Kunlun MCGS Embedded Organization Software
เวลา:2022-12-29 16:17:25
ระบบผู้ใช้ที่สร้างขึ้นโดย MCGS Embedded Edition ประกอบด้วยห้าส่วน: หน้าต่างควบคุมหลักหน้าต่างอุปกรณ์หน้าต่างผู้ใช้ฐานข้อมูลแบบเรียลไทม์และนโยบายการดำเนินงาน
1, หน้าต่างควบคุมหลัก: โครงสร้างหลักของระบบ ใช้ในการกำหนดค่าพารามิเตอร์ที่เกี่ยวข้องกับโครงการทั้งหมด มันสามารถตั้งค่าหน้าต่างปก, สิทธิ์ในการเรียกใช้โครงการ, หน้าจอเริ่มต้น, หน้าจอหน่วยความจำ, พื้นที่ดิสก์สำรอง, ฯลฯ.
2, หน้าต่างอุปกรณ์: เป็นข้อมูลการติดต่อของระบบและอุปกรณ์ภายนอก ใช้เป็นพิเศษในการวางส่วนประกอบของอุปกรณ์ชนิดต่าง ๆ และฟังก์ชั่นการดำเนินการและการควบคุมของอุปกรณ์ภายนอก หน้าต่างอุปกรณ์รวบรวมข้อมูลจากอุปกรณ์ภายนอกผ่านส่วนประกอบของอุปกรณ์ส่งไปยังฐานข้อมูลแบบเรียลไทม์หรือส่งออกข้อมูลจากฐานข้อมูลแบบเรียลไทม์ไปยังอุปกรณ์ภายนอก
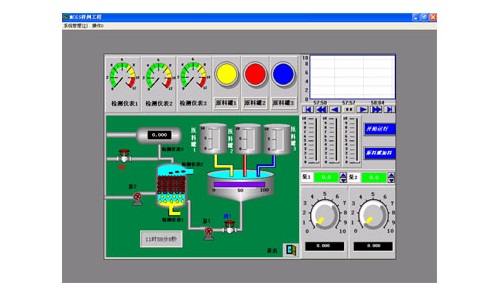
3. หน้าต่างผู้ใช้: "การสร้างภาพ" ของข้อมูลระบบและกระบวนการเสร็จสมบูรณ์ อินเทอร์เฟซภาพทั้งหมดในโครงการถูกสร้างขึ้นในหน้าต่างผู้ใช้ วัตถุกราฟิกสามประเภทสามารถวางไว้ในหน้าต่างผู้ใช้: องค์ประกอบสัญลักษณ์และแอนิเมชั่น ด้วยการวางเป้าหมายกราฟิกที่แตกต่างกันในหน้าต่างผู้ใช้ผู้ใช้สามารถสร้างส่วนต่อประสานกราฟิกที่ซับซ้อนต่างๆและเสร็จสิ้น "การสร้างภาพ" ของข้อมูลและกระบวนการในรูปแบบที่แตกต่างกัน
4. ฐานข้อมูลแบบเรียลไทม์: เป็นศูนย์กลางของระบบ ฐานข้อมูลแบบเรียลไทม์ทำหน้าที่เป็นศูนย์กลางการประมวลผลข้อมูลและพื้นที่แลกเปลี่ยนข้อมูลสาธารณะ ข้อมูลแบบเรียลไทม์ที่รวบรวมจากอุปกรณ์ภายนอกจะถูกป้อนลงในฐานข้อมูลแบบเรียลไทม์และข้อมูลการดำเนินงานที่เหลือของระบบก็มาจากฐานข้อมูลแบบเรียลไทม์เช่นกัน
5, กลยุทธ์การดำเนินงาน: คือการใช้กระบวนการดำเนินงานของระบบเพื่อดำเนินการควบคุมที่มีประโยชน์ กลยุทธ์การปฏิบัติงานเป็นโครงสร้างการจัดหาระบบซึ่งวางไว้ใน "บรรทัดนโยบาย" ซึ่งประกอบด้วยส่วนประกอบของเงื่อนไขนโยบายและส่วนประกอบของนโยบาย หลังจากกำหนดกลยุทธ์การดำเนินงานแล้วระบบสามารถทำงานตามลำดับและเงื่อนไขที่กำหนดเพื่อให้การควบคุมที่สมบูรณ์แบบของกระบวนการของอุปกรณ์ภายนอก
-
 202302-21
202302-21การจำแนกประเภทการหยุดชะงักของ PLC ซีรีย์ OMRON CP1
1. การหยุดชะงัก I / O โดยตรงคือการเปลี่ยนแปลงการป้อนข้อมูลที่ขัดจังหวะ (0 → 1; 1 → 0) ของหน่วยอินพุตในตัวบนชั้นว···
-
 202303-02
202303-02ฟังก์ชั่นการปรับปุ่มเดียวของเซอร์โวมอเตอร์ Mitsubishi
เมื่อติดตั้งเซอร์โวมอเตอร์ที่แตกต่างกันบนเครื่องเป็นครั้งแรกบางครั้งพวกเขาอาจไม่ตรงกับเครื่องในระหว่···
-
 202302-10
202302-10คำอธิบายพารามิเตอร์รีเลย์ Omron
แรงดันไฟฟ้าที่ใช้งานได้ (ปัจจุบัน):หรือที่เรียกว่าแรงดันไฟฟ้าขดลวดหมายถึงแรงดันไฟฟ้าหรือกระแสที่รีเลย์···
-
 202302-09
202302-09ขั้นตอนการอัพโหลดหน้าจอ MCGS
1. ติดตั้งซอฟต์แวร์กำหนดค่า MCGS บนคอมพิวเตอร์ก่อนจากนั้นหาแหล่งจ่ายไฟเพื่อจ่ายพลังงานให้กับหน้าจอสัมผัส ···
-
 202212-29
202212-29วิธีทดสอบ Delta Circuit Breaker AC คอนแทคและอินเวอร์เตอร์
1. เบรกเกอร์เบรกเกอร์เป็นอุปกรณ์ที่สามารถทำงานด้วยตนเองหรือโดยอัตโนมัติ ใช้ในการควบคุมการเปิด-ปิดของแหล···


 +86 13811814778
+86 13811814778 +86 13811814778
+86 13811814778
 อาคาร 26 ชุมชน Liyuan ถนน Xiangjiang North Cuigezhuang เขต Chaoyang ปักกิ่ง
อาคาร 26 ชุมชน Liyuan ถนน Xiangjiang North Cuigezhuang เขต Chaoyang ปักกิ่ง